一、引言
游戏中的人工智能指拥有决策能力的智能体,会对环境的改变作出相应的决策。其中,移动是智能体最基本也是最通用的行为。
智能体的移动可以分为三个环节:
- 行为选择:该部分负责选定目标、制定计划。它来告诉我们“到这来”和“做好A、B,然后做C”。
- 操控:该环节负责计算运动数据,根据选择的行为计算得到一个操控力,它决定智能体往哪儿移动以及如何快速移动。
- 移动:主要表现智能体运动的机械因素,即控制智能体的移动方式。比如,人和汽车有不同的移动方式,虽然他们具有同样的意向,收到相同的操控力,但是最终的移动表现是完全不同的。
二、模型建立:MovingEntity
在开始之前首先建立一个最基本的移动智能体的模型,即确定下移动的环节。
通常一个移动的智能体具有以下属性:
- 位置:position
- 方向:rotation
- 质量:mass
- 速度:velocity
- 操控力:force
- 最大速度:maxSpeed
- 最大操控力:maxForce
- 最大转动速率:maxTurnRate
MovingEntity类中需要有Update()方法来每帧更新智能体的物理状态,代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| public void Update()
{
if (mass == 0) mass = 1;
Velocity = Force / mass * Time.deltaTime + Velocity;
if (Velocity.sqrMagnitude > maxSpeed * maxSpeed)
Velocity = Velocity.normalized * maxSpeed;
transform.position += Velocity * Time.deltaTime;
var fn = Velocity.normalized;
var vn = transform.forward;
if (fn == default) return;
var angle = Vector3.Angle(fn, vn);
if (angle < 5) return;
var axis = Vector3.Cross(fn, vn);
transform.Rotate(axis, -maxTurnRate * Time.deltaTime, Space.World);
transform.Rotate(transform.forward * rotationSpeed * Time.deltaTime, Space.World);
}
|
三、个体行为
接下来是最关键的部分,根据不同的行为计算需要施加的操控力。在分析各种行为过程中,我们总是遵循一个公式:
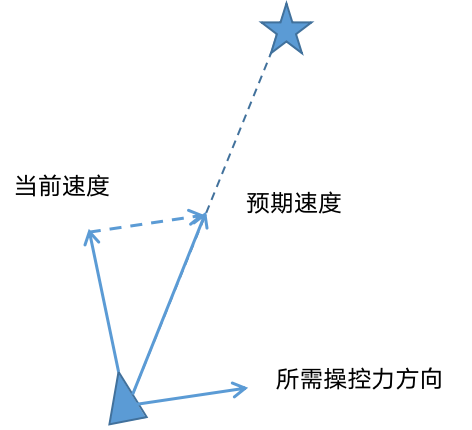
Seek(靠近)
- 预期速度:这个速度为智能体在理想状态下到达目标位置所需的速度,方向为智能体到目标位置的向量,大小为最大速度。
- 所需操控力:方向为 (预期速度-当前速度),大小为最大操控力大小。
![]()
1
2
3
4
5
6
7
| public static Vector3 Seek(this MovingEntity entity, Vector3 target)
{
var dis = target - entity.transform.position;
var needVelocity = dis.normalized * entity.maxSpeed;
var deltaVelocity = needVelocity - entity.Velocity;
return deltaVelocity.normalized * entity.maxForce;
}
|
![]()
Flee(远离)
- 预期速度与Seek正好相反。
- 可以进行适当调整,如当目标进入到一定范围内才产生远离的操控力。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
| public static Vector3 Flee(this MovingEntity entity, Vector3 target, float keepDistance)
{
var pos = entity.transform.position;
if ((pos - target).sqrMagnitude >= keepDistance * keepDistance)
{
if (entity.Velocity.sqrMagnitude < 0.1)
{
entity.Stop();
return Vector3.zero;
}
return entity.Velocity.normalized * -1;
}
var needVelocity = (pos - target).normalized * entity.maxSpeed;
var deltaVelocity = needVelocity - entity.Velocity;
return deltaVelocity.normalized * entity.maxForce;
}
|
Arrive(抵达)
- 与Seek不同,Arrive可以实现减速并停在目标位置。当与目标距离大于阈值时算法与Seek相同,当距离小于阈值时需要进行减速。
- 进入阈值时的预期速度:方向为智能体到目标位置的向量,大小与距离的1/2次幂成正比。
- 所需操控力:方向为 (预期速度-当前速度),大小为最大操控力大小。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| public static Vector3 Arrive(this MovingEntity entity, Vector3 target, float slowDownDis = 10)
{
var toTarget = target - entity.transform.position;
var dis = toTarget.magnitude;
if (dis > slowDownDis) return entity.Seek(target);
if (dis > 0.1)
{
var needSpeed = (float)Math.Sqrt(2 * entity.maxForce / entity.mass * dis);
var needVelocity = toTarget.normalized * needSpeed;
return (needVelocity - entity.Velocity).normalized * entity.maxForce;
}
entity.Stop();
return Vector3.zero;
}
|
![]()
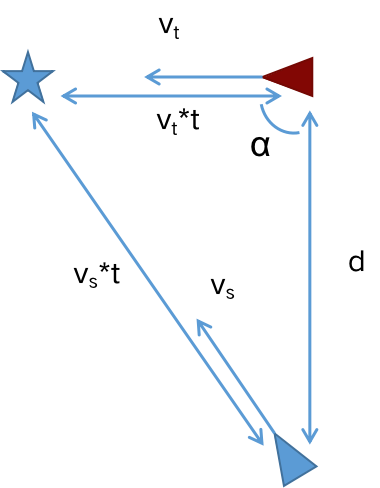
Pursuit(追逐)
- 在追逐目标时,我们通常不会直接向目标的当前位置跑,而是会预测目标未来的位置,向预测的位置跑,期间不断通过调整来缩短差距。
- 预测目标位置的算法可以变得很复杂,但我们可以做个折衷的选择,在保证足够的精度的同时又不会消耗过多的性能。
- 我们主要要计算的就是追上的位置距离当前目标的位置有多远,这个距离与当前自己与目标的距离成正比,与目标速度的二次幂成正比,与自己速度的二次幂成反比。
- 此外,需要考虑一种特殊情况,当目标朝向自己跑时,这时候不需要预测位置,直接朝向目标当前位置跑就能追上了。
![]()
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
| public static Vector3 Pursuit(this MovingEntity entity, MovingEntity target, float keepDistance = 0.1f)
{
var dir = entity.transform.position - target.transform.position;
if (dir.sqrMagnitude <= keepDistance * keepDistance)
{
entity.Stop();
return Vector3.zero;
}
if (Vector3.Angle(dir, target.transform.forward) < 20)
{
return Seek(entity, target.transform.position);
}
var tarSpeed = target.Velocity.magnitude;
var lookAheadDis = dir.magnitude * tarSpeed / entity.maxSpeed;
var tarPos = target.transform.position + target.Velocity.normalized * lookAheadDis;
return entity.Seek(tarPos);
}
|
![]()
Evade(逃避)
1
2
3
4
5
6
7
8
| public static Vector3 Evade(this MovingEntity entity, MovingEntity target, float keepDistance)
{
var dir = entity.transform.position - target.transform.position;
var tarSpeed = target.Velocity.magnitude;
var lookAheadDis = dir.magnitude * tarSpeed / entity.maxSpeed;
var tarPos = target.transform.position + target.Velocity.normalized * lookAheadDis;
return entity.Flee(tarPos, keepDistance);
}
|
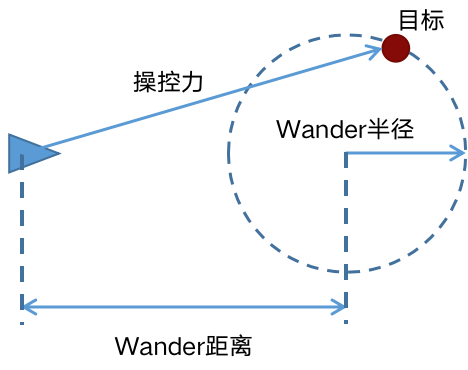
Wander(徘徊)
- 定义:产生一个操控力,使智能体在场景内随机移动。
- 两个错误(欠优)的思路:1.使用普通的随机算法每帧都计算一个随机的驱动力:因为随机算法取到的随机数不是连续的,所以无法实现持续的驱动力变化,会产生抖动。2.使用Perlin噪声,可以产生连续的转弯,但是性能开销较大。
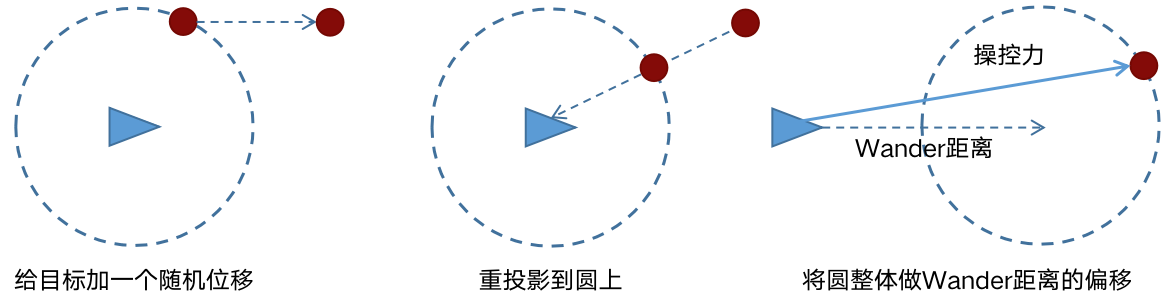
- Reynolds的解决方案:在智能体前端突出一个圆圈,目标被限制在该圆圈上。每帧给目标添加一个随机的位移,来产生一个随机但连续的操控力。通过控制圆圈的半径、圆圈到智能体的距离以及每帧随机位移的大小,就能产生各种形式的随机运动。
- 三维空间中,智能体的目标就改成限制在一个球体上。
![]()
![]()
1
2
3
4
5
6
7
8
9
10
| public static Vector3 Wander(this MovingEntity entity, float wanderRadius, float wanderDistance, float wanderJitter,
bool limit = true)
{
entity.WanderTarget += new Vector3(Random.Range(-1 * wanderJitter, wanderJitter),
Random.Range(-1 * wanderJitter, wanderJitter), 0);
var limitParam = limit ? 0 : 1;
var wanderCirclePoint = entity.Velocity.normalized * wanderDistance + entity.transform.position * limitParam;
entity.WanderTarget = wanderCirclePoint + wanderRadius * (entity.WanderTarget - wanderCirclePoint).normalized;
return entity.Seek(entity.WanderTarget);
}
|
![]()
![]()
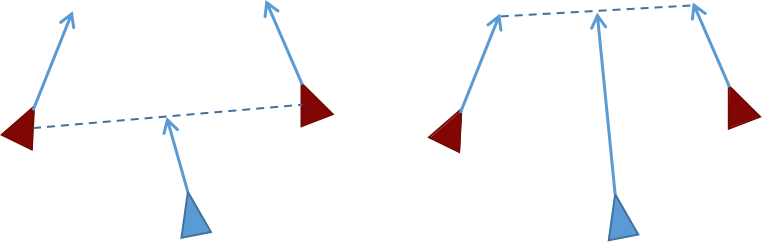
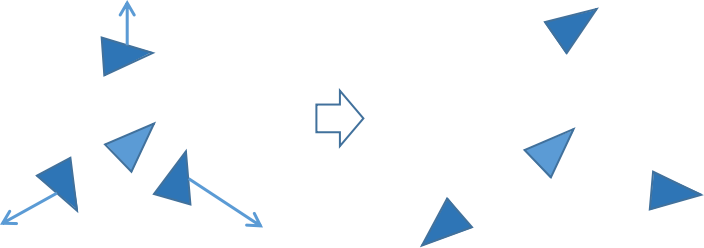
Interpose(插入)
- 定义:产生一个操控力,控制智能体移动到两个智能体的中点,可以用于运动员截球,保镖保护老板等行为。
- 实现方法:
- 计算智能体移动到当前两个目标连线中点需要的时间t。
- 计算t时间后两个目标所在的位置。
- 连线中点就是智能体的目标位置,使用Arrive移向它。
![]()
1
2
3
4
5
6
7
8
9
10
| public static Vector3 Interpose(this MovingEntity entity, MovingEntity targetA, MovingEntity targetB)
{
var targetAPos = targetA.transform.position;
var targetBPos = targetB.transform.position;
var centerNow = (targetAPos + targetBPos) / 2;
var time = (entity.transform.position - centerNow).magnitude / entity.maxSpeed;
var targetAPosPre = targetAPos + targetA.Velocity * time;
var targetBPosPre = targetBPos + targetB.Velocity * time;
return entity.Arrive((targetAPosPre + targetBPosPre) / 2);
}
|
![]()
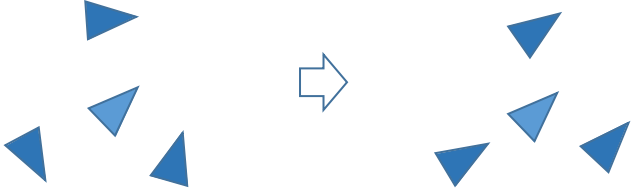
Offset Pursuit(保持一定偏移的追逐)
- 定义:在追逐的同时保持智能体与目标之间有一个指定的偏移。可用于体育比赛中的盯防、实现战斗编队、空中飞船对接等。
- 实现思路:与追逐类似,需要预测下一个带偏移的目标位置,然后用Arrive接近该位置(不能用Seek)。
1
2
3
4
5
6
7
8
9
| public static Vector3 OffsetPursuit(this MovingEntity entity, MovingEntity target, Vector3 offset)
{
var dir = entity.transform.position - target.transform.position;
var tarSpeed = target.Velocity.magnitude;
var lookAheadDis = dir.magnitude * tarSpeed / entity.maxSpeed;
var tarPos = target.transform.position + target.Velocity.normalized * lookAheadDis +
target.transform.TransformVector(offset);
return entity.Arrive(tarPos, 10);
}
|
![]()
四、群体行为
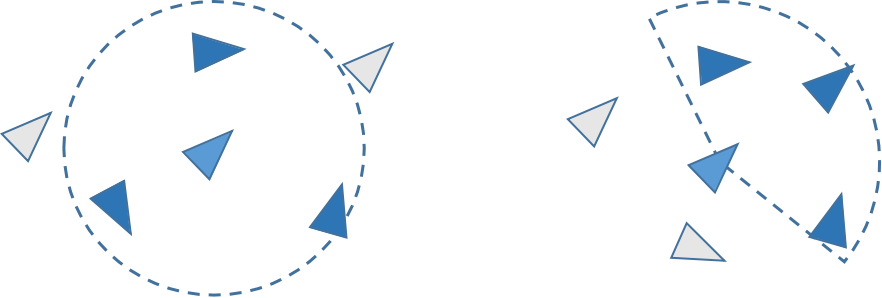
- 在群组中,通常个体的感知范围是有限的,因此每个智能体都有邻域的概念,只有在距离自己一定范围内的智能体才能感知到。这个数据可以以列表的形式存在MovingEntity中,在每一帧去更新这个列表。
- 更进一步地,可以增加可视域的限制,智能体只能看见一定视角范围内的其他智能体,来达到更真实的模拟。
![]()
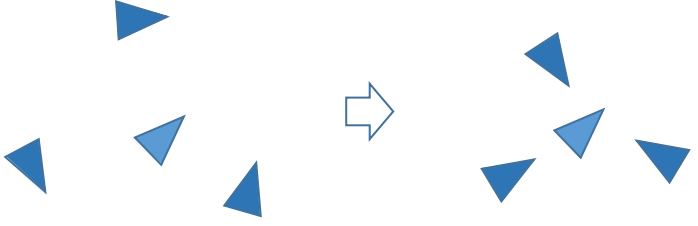
Separation(分离)
- 定义:产生一个操控力,使得智能体远离临近的智能体,且这个力的大小反比于两个智能体之间的距离。
- 结合:分离可与其他个体行为结合,形成各种群体行为,如群体追逐、群体靠近、群体远离等。
![]()
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
| public static Vector3 Separate(this MovingEntity entity, List<MovingEntity> teammate, float desiredSeparation = 2)
{
var force = Vector3.zero;
Vector3 dir;
float dis;
var count = 0;
foreach (var mv in teammate)
{
if (mv == entity) continue;
dir = entity.transform.position - mv.transform.position;
dis = dir.magnitude > 0.1f ? dir.magnitude : 0.1f;
if (dis <= desiredSeparation)
{
force += dir.normalized / dis;
count++;
}
}
if (count == 0) return Vector3.zero;
return force.normalized * entity.maxForce;
}
|
Alignment(队列)
- 定义:智能体企图与邻域中的智能体保持一致的方向。
- 预期速度:邻域中所有智能体的平均速度。
- 可用于模拟马路上汽车的运动
![]()
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| public static Vector3 Align(this MovingEntity entity, List<MovingEntity> teammate, float neighborDist = 10)
{
var needVelocity = Vector3.zero;
var count = 0;
foreach (var mv in teammate)
{
if (mv == entity) continue;
if ((entity.transform.position - mv.transform.position).sqrMagnitude <= neighborDist * neighborDist)
{
needVelocity += mv.Velocity;
count++;
}
}
if (count <= 0) return Vector3.zero;
needVelocity /= count;
return (needVelocity - entity.Velocity).normalized * entity.maxForce;
}
|
Cohesion(聚集)
- 定义:智能体试图朝向邻域中所有智能体的质心移动。
- 实现思路:求邻域的质心并靠近(Seek)。
![]()
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| public static Vector3 Cohesion(this MovingEntity entity, List<MovingEntity> teammate, float neighborDist = 10)
{
var center = Vector3.zero;
var count = 0;
foreach (var mv in teammate)
{
if (mv == entity) continue;
if ((entity.transform.position - mv.transform.position).sqrMagnitude <= neighborDist * neighborDist)
{
center += mv.Velocity;
count++;
}
}
if (count <= 0) return Vector3.zero;
center /= count;
return entity.Seek(center);
}
|
Flocking(群集)
- 鸟群算法(Boids):Reynolds提出将分离、队列、聚集三种群体行为以一定权重组合,就能模拟各种群集的移动,如:鸟群、鱼群、羊群等。
- 特点:群集不需要任何控制中心或Leader就能实现自发的移动,每个单元都是平等的,受到整体的影响,同时也会影响整体。
- 在此基础上可以加入Wander或Seek,保证单位掉队时不会停下。
- 扩展:为了达到更自然的模拟效果,可以用Perlin噪声生成权重,使分离、队列、聚集三种行为的权重随着时间变化。
![]()
五、组合操控行为
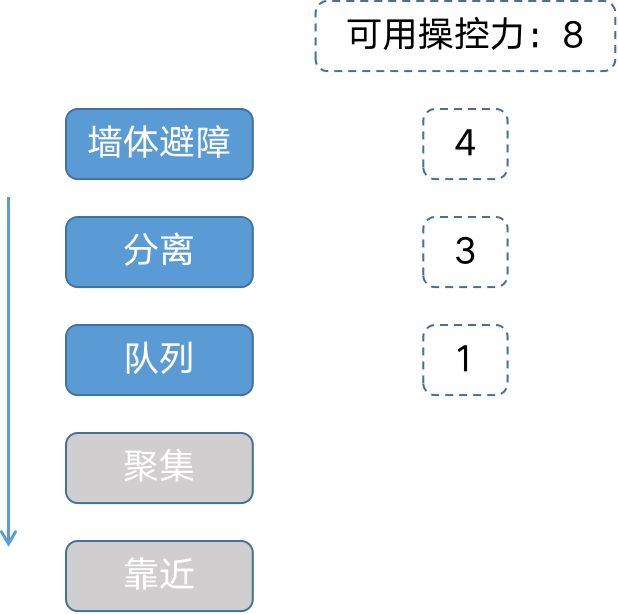
带优先级的加权截断总和
每个行为都有优先级,按照优先级顺序计算操控力。
每一帧有可用操控力的概念。
计算步骤:
- 若该操控力已将可用操控力用完,则不进行后续运算,直接执行该操控力。
- 若还有剩余的操控力,则进行下一个优先级行为的计算,计算结果按照最大操控力和剩余操控力的值两者的较小值截断。
- 以此类推直到可用操控力用完。
![]()
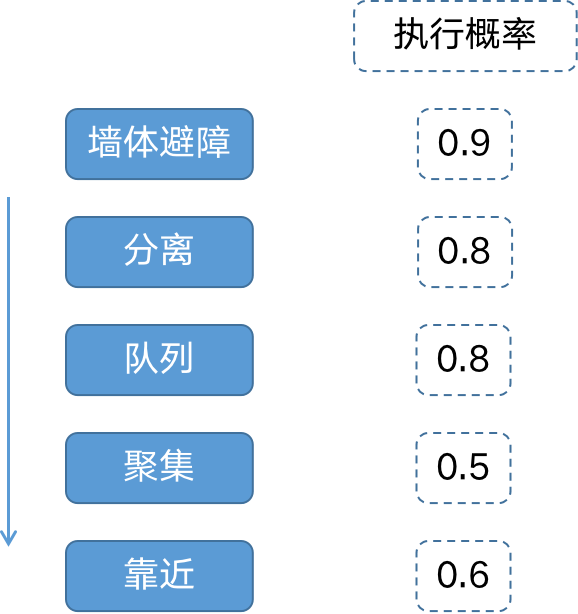
带优先级的抖动
- 每个行为都有优先级和执行概率。
计算步骤:
- 根据优先级最高行为的执行概率计算是否需要计算该行为的操控力。
- 如果要求值而且求出的操控力不为零,则直接执行该行为,不考虑其他行为。
- 否则继续计算下一优先级的行为,以此类推。
适用于不需要非常精确的情形。
![]()
六、优化方法
- 尽量使用距离的平方。
- 若经常需要计算三角函数,可以建立正余弦查询表。
- 减少不必要的中间结果变量创建,特别是在循环中。
- 网格空间分隔
- 问题:在群体移动行为相关的算法中,通常每个智能体都需要遍历邻域中的所有智能体,复杂度为O(N2)。
- 网格空间分隔:将空间分割为若干网格,每个网格维护一个List,储存其中的智能体。每帧开始时根据位置更新所有网格的数据。在具体行为的计算时,每个智能体能根据自己的位置确定处于哪个网格,该网格(或包含相邻网格)下的所有智能体就是自己邻域中的智能体。
- 复杂度:O(N)
参考资料:
- 《游戏人工智能编程案例精粹》第3章:如何创建自治的可移动游戏智能体
- 《代码本色》第6章:自治智能体
Demo地址:https://github.com/Luciano-0/AIMovement.git